- Pametna mreža za prepoznavanje točk prijema na tkaninah
Novice
V Laboratoriju za vizualne spoznavne sisteme na UL FRI so v okviru bazičnih raziskav o robotski manipulaciji razvili nove metode za detekcijo točk prijema deformabilnih predmetov, kot so tkanine in krpe. Manipulacija s tkaninami predstavlja velik izziv, saj močna deformacija predmetov močno spremeni njihov videz in oteži identifikacijo primernih točk za manipulacijo.
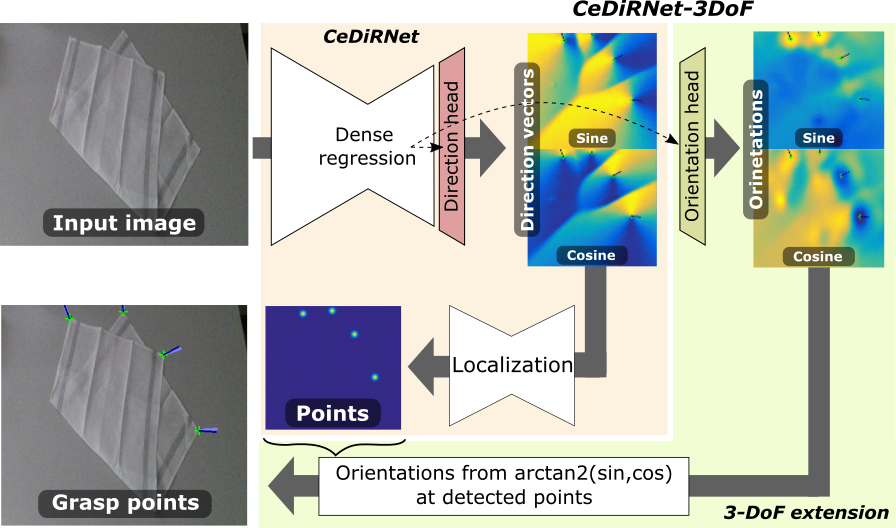
Za reševanje tega problema so razvili nov model globokega učenja, imenovan CeDiRNet-3DoF, ki z uporabo regresije smernih vektorjev ter pred-naučenih globokih modelov omogoča natančno detekcijo točk prijema na tekstilu. Model so naučili na več kot 6000 učnih primerih za detekcijo kotov na tkaninah in dokazali, da se v realnih situacijah odlično obnese v primerjavi z najnovejšimi obstoječimi metodami, kot so transformerski modeli (npr. DETR, DINO).
Pomemben prispevek njihove raziskave je tudi podatkovna zbirka slik, ki je primerna tako za učenje različnih modelov kot tudi za njihovo primerjavo. S tem so prispevali k boljšemu razumevanju in reševanju izzivov pri manipulaciji s tkaninami, kar ima lahko pomembne praktične posledice za razvoj pametnih robotov, sposobnih obvladovati vsakodnevne naloge, kot so zlaganje perila, priprava oblačil za pranje ter postavljanje mize z prti.
CeDiRNet za določanje optimalnih prijemnih točk
Raziskovalni članek z naslovom Center Direction Network for Grasping Point Localization on Cloths, ki so ga napisali znan. sod. dr. Domen Tabernik, asist. Jon Muhovič, Matej Urbas in prof. dr. Danijel Skočaj, je bil objavljen v znanstveni reviji IEEE Robotics and Automation Letters v sodelovanju z Inštitutom Jožef Stefan, v okviru projekta Robotsko pregledovanje in manipulacija tekstila in tkanin. Tako podatkovna zbirka kot tudi koda in modeli CeDiRNet-3DoF so javno dostopni tukaj.
Postopek določanja prijemnih točk
Članek si lahko v celoti preberete tukaj. (9. september 2024)